DIY Servo SubWoofer (Velocity Feedback)
A 10Hz Subwoofer
One side effect of motional feedback of any kind is it can push the frequency down below the driver and cabinet resonance. With velocity feedback this 10" subwoofer has flat-ish near-field response from 10Hz to 150Hz. The effect of having such a small a cone is that you can't produce a lot of acoustical power down there. Fortunately this sub is just for music, and not for special effects. I would want a 15" sub for home theater. Also, keep in mind that this feedback will not work on a ported speaker box.
Box and SD270A-88 Driver Response

Bode plot of the driver in the enclosure, without velocity feedback. The woofer is in an enclosure with an internal volume of 73 liters, giving QTC = 0.669, f3 = 43Hz. The free-air resonance of the Dayton Audio SD270A-88 is 26.2Hz.
A dual voice coil driver has two nearly identical windings on the same coil form and moving in the same magnetic field. One coil can be driven and the other used to provide velocity feedback, if the feedback signal is compensated [1]. My plots do not look exactly like theirs, because their velocity is coil voltage w.r.t. laser-measured velocity, where mine is coil voltage with a zero reference.
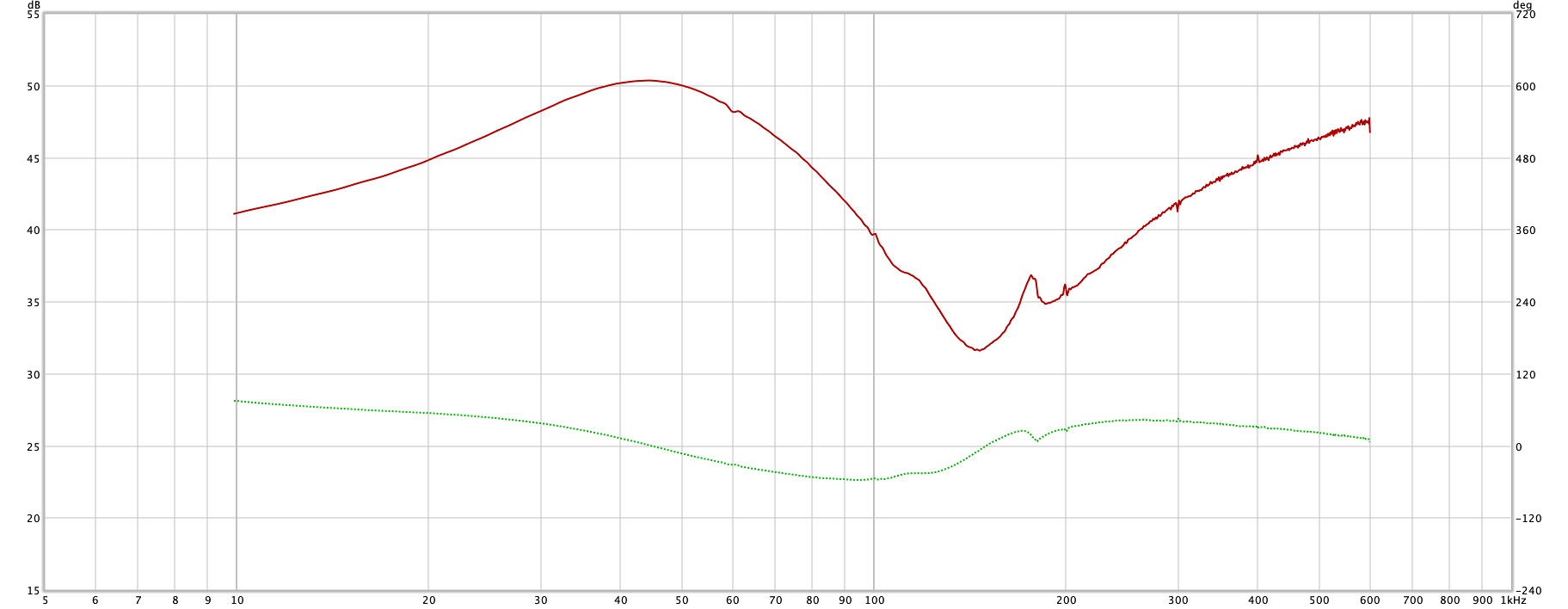
With any dual voice coil low frequency driver, the signal is not really a perfect match to the velocity of the cone. There is mutual inductance between the two coils that causes a 180° phase shift and a dip in the amplitude response. The frequency of this anomaly is higher than my subwoofer's crossover point, but its effect is still within the crossover region. Below f0 there is a broad peak which needs to be removed as well.
The disturbance in response can be counteracted by a 2nd order filter, with f0 = 146Hz. That puts the feedback back in line with the actual cone velocity, at least enough that the crossover can go above the current 70Hz.
Test Fixture
I built a fixture to hold a 40W stereo amplifier board and 200VA 18V + 18V transformer, this servo board, a USB DAC and UC22 input device (a Chinese clone of a UMC22). The DAC is used by REW to generate the sweeps. The UC22 is used to read the feedback signal into REW, which analyzes the data and generates plots. The 18VCT also powers the servo board. For frequency response curves I used a MiniDSP UMIK-1 dangling from a camera tripod.
Velocity Feedback Circuit

The circuit consists of two main parts - a special feedback filter and a differential amplifier. The feedback filter takes as input the output of the voice coil, which can be several volts. It must not overdrive the filter, so there is a pot to adjust it down to a reasonable level.
From there the signal goes to the differential amplifier, where it is subtracted from the sum of the two preamp channels. The output from the differential amplifier is the error voltage, which drives the power amplifier. In practice, the preamp channels come from the crossover already frequency limited. In fact, it is a requirement. The feedback will only work below about 400Hz, and the crossover needs to be well below that, if you are using it as a standalone sub. If you are using it as a sub in a 3-way or 4-way system, you might want to cross it higher, like 150 or 200. In any case, don't put a full range signal on the input. It would be a disaster. I'm not certain what it would sound like, but it would be loud, high-pitched, and would likely melt the voice coil.
The feedback input trimmer is buffered by U4B, so there is no interaction between the trimmer position and the frequency of the filter. The filter is U3A. The feedback has to be boosted in the area where it is low, and a phase shift added to get the phase back in control. The filter is a 2nd order LR low pass filter with Q adjustment added. The output of this section, taken off of trimmer pot RV3, is the compensated feedback signal. This signal should never be stronger than the input signal. It would cause a phase reversal, and the negative feedback would become positive, causing the amp to oscillate rail-to-rail on the driver. Very loud. Like when you try to plug in the first RCA plug to your amp when the amp is on. Only louder. You'll see when you adjust the trimmers to tune the circuit.
U4A is a summing amplifier, used to sum the left and right signals into a single mono signal. U3B is the differential amplifier which subtracts the feedback from the summed inputs. The overall gain of the differential amplifier is 45. The output is the error voltage of the servo. It has that much gain because the driver needs to really react to the error. Remember it is not the input signal - it is the difference between the input signal and the feedback signal. The higher the gain the closer the cone will follow the input signal. In effect, it puts the amplifier and the driver in the feedback loop.
Tuning
There are 4 adjustment points on the servo circuit board. Tuning is simple, but involves adjusting the 4 trimmers to get the feedback just right. I put together an updated PDF file describing how to tune the circuit.
Results
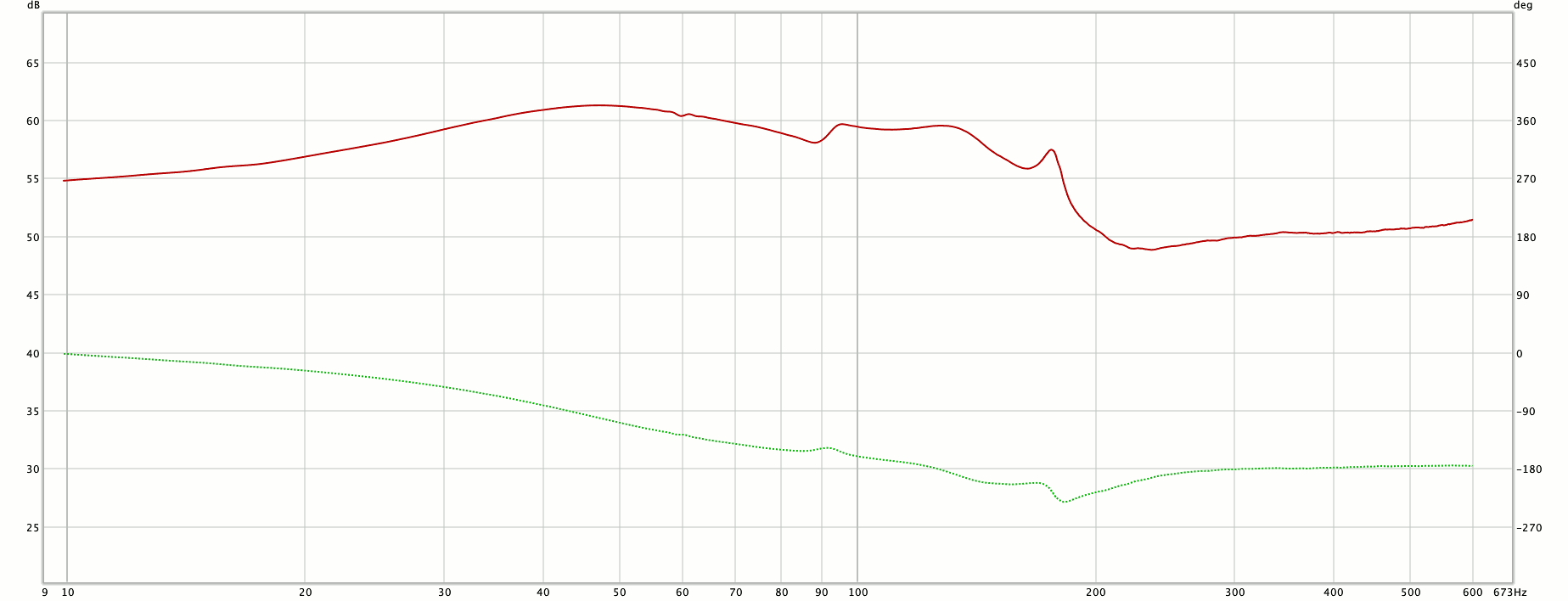
REW was used to measure the feedback response again, this time at the output of the feedback compensator, resulting in the plot to the left. This plot is really only for curiosity - the servo board was tuned using the curve of the speaker output, with the error signal driving the amplifier.
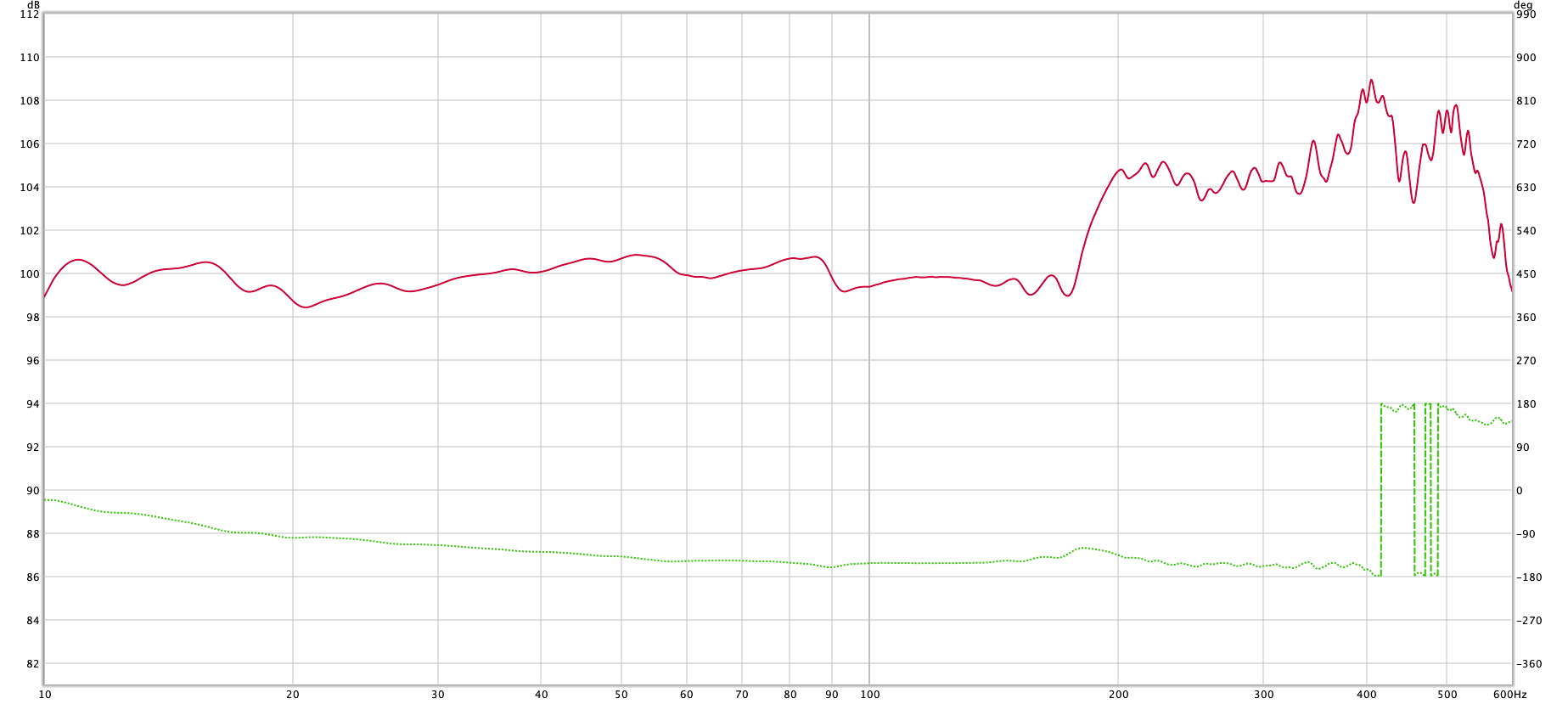
REW was used to create a plot of the driver in the enclosure, with velocity feedback. The plot is to the left. It measures ±1.265dB (2.53dB p-p) from 10Hz to 180Hz. The crossover was required to be at 70Hz before this experiment, but now I have moved it to 85Hz to get above the 63Hz f3 of the main woofers in my existing speakers.
What about that junk above 180Hz? It is an artifact of the driver, exacerbated by the lower feedback above 170Hz. I have a 48dB/octave LR crossover at 85Hz which effectively reduces that. It will be -51dB at 170Hz.
Fine Print
It can't be all good all the time. A 10" driver can only move so much air, so it can only get so loud at any given frequency. When you exceed that loudness, the driver gets nonlinear, causing a flat spot on the feedback. The amp will push at full power to try to get the driver to move farther. It makes a very loud click noise as it applies full power to the driver. There is no way around the physics of it. If you need to go lower and/or louder, you need a bigger cone or more of them. That is always true, but with velocity feedback it is more obvious when your woofer gets overextended, since it won't go gracefully nonlinear.
Also, although harmonic distortion is generally improved by a factor of 2 to 3 above resonance, it is only slightly improved below resonance. Not as bad as trying to get 13Hz out of a 43Hz box without feedback, but bad enough.
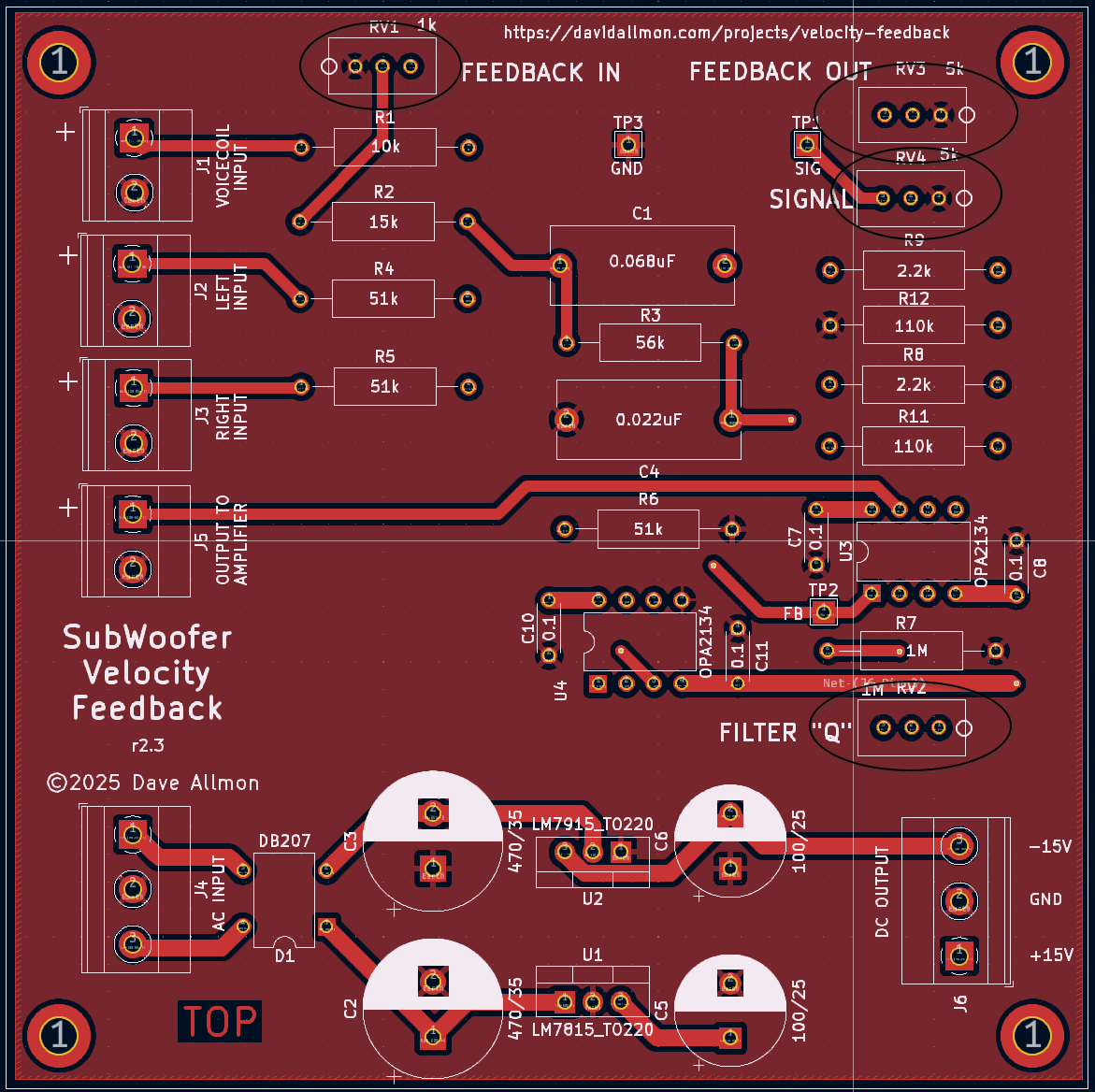
PC Board
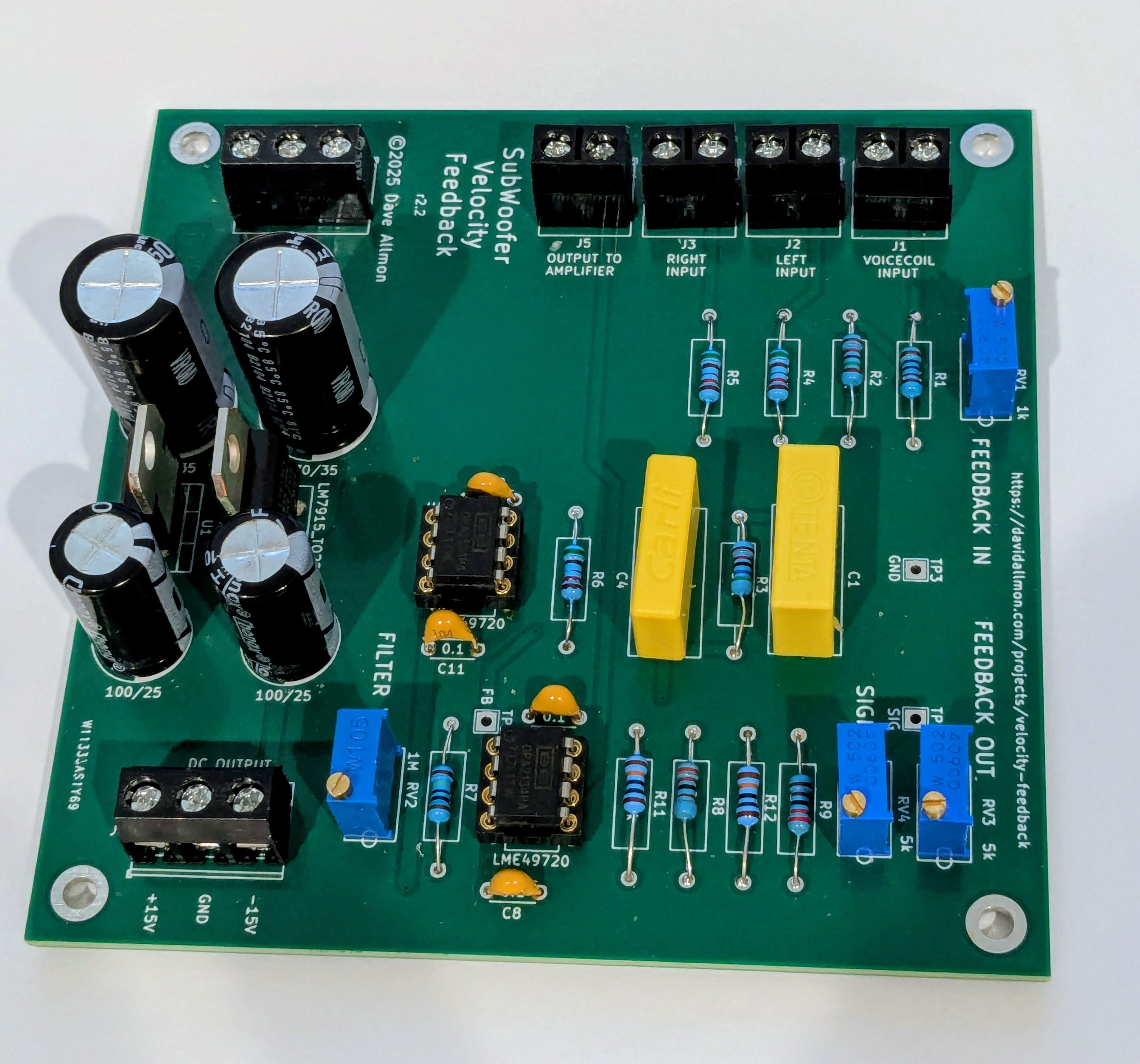
I had the velocity feedback servo circuit made on a 100mm x 100mm PCB. This is a picture of the final board. There is another board, which holds a bridging adapter. I used that so I could bridge a pair of 50W amps to drive the sub. They go in the subwoofer amplifier area, between the input and the amplifiers. The servo board connects to one voice coil of the driver.
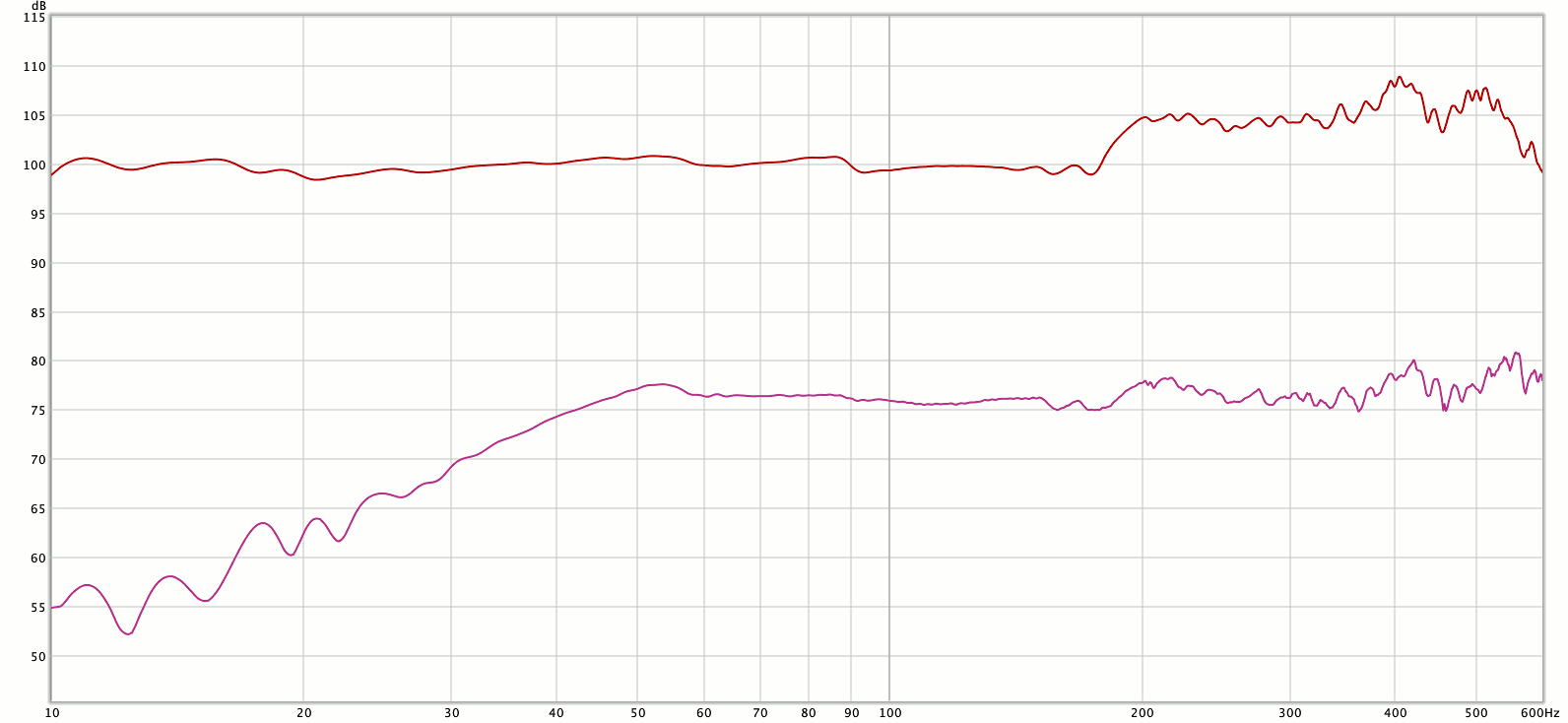
The bottom trace is the subwoofer frequency response before velocity feedback. It has the familiar drop-off at the box/driver resonance. The top trace is the subwoofer frequency response after velocity feedback was added. It is pretty flat down to 10Hz. The vertical position difference is just so both traces show. The sub is capable of going down to nearly DC, certainly lower than 1Hz, but I can't prove it. REW is my only audio function generator, and it only goes down to 10Hz. With my first VFB sub, I had a function generator that went to 0.1Hz, and a DC-coupled amplifier. It would move the cone at that frequency, but not only can you not hear it, you can't feel it either, at least not with a 15" cone. At DC, the cone would move out and stop, then very slowly creep back to the center.
Listening
With the room resonances mostly tamed using the MiniDSP, the only thing left to do was listen to some music. I have a set of tunes that really challenge the speakers at specific ranges. The extended response makes it clear that there are low frequencies in many recordings. I'm running the sub at a lower level than the main speakers, maybe 2-3dB, because of room resonances, and it just sounds fantastic. A miniDSP 2x4 is acting as a crossover and EQ for the sub.
I'm building a set of dipole-like speakers, each with a sub as the main woofer, followed by a 6.5" woofer, 2" dome mid and a cloth dome tweeter. The tweeter has the flattest response of any tweeter I've ever seen, regardless of price. It costs $11.49 at P-E. 2 MiniDSP 2x4 units act as the crossover. The 4-way crossover splits the signal into 4 ranges. Lower powered amplifiers are where active crossovers really come in handy. You don't waste all their power on the crossover components. One 100w amp drives the sub and each of the other drivers has its own LM3886 amp. That's a combination I've used before, so I'm used to it. Last time it was a bridged stereo LM3886 running the sub. The sub's amp is not the one I tested with, though. I tested with a 40W LM3886 amp. The real amp is a "300w" board from China running at about 100W. I didn't want to test with an amp that could fry the speaker. To the amp makers, 2 transistors = 100W, 4 transistors = 200W, and so on, up to 500W, with the same power supply voltage. Creative. I figured the amps running at 100W with 6 output transistors won't melt. I used an Antek AS-2230 200VA transformer for that amp. Also, one AS-3224 300VA to feed the 3 LM3886 amps on each channel ±32VDC. Each supply has a rectifier/filter board with capacitance of either 10,000μF x 2 for the sub amp, or 18,800μF x 2 for the 3 LM3886 amps. Then there is a little AS-0518 to run the servo board. That's a lot of transformers. I've gathered most of the parts for the speakers, and have them in a big box. But I've only tested the subwoofers.
Historically, it seems to me, most of the cost of a speaker is the stuff to make it pretty. Well, except maybe when you use 4 amplifiers per channel.
1. Radcliff, Clark J., Gogate, Sachin D. (1996) "Velocity Feedback Compensation of Electromechanical Speakers for Acoustic Applications"