Filter Wheel for Astrophotography
These two projects each resulted in a usable color filter wheel, but the first (V2) proved to be affected by extreme changes in humidity. It took three years to show here in the desert, but might be a real problem in areas where the humidity changes frequently. What I learned from this filter wheel I was able to apply to the next one (v3). It uses the same basic design, same motor and electronics, but uses different materials.
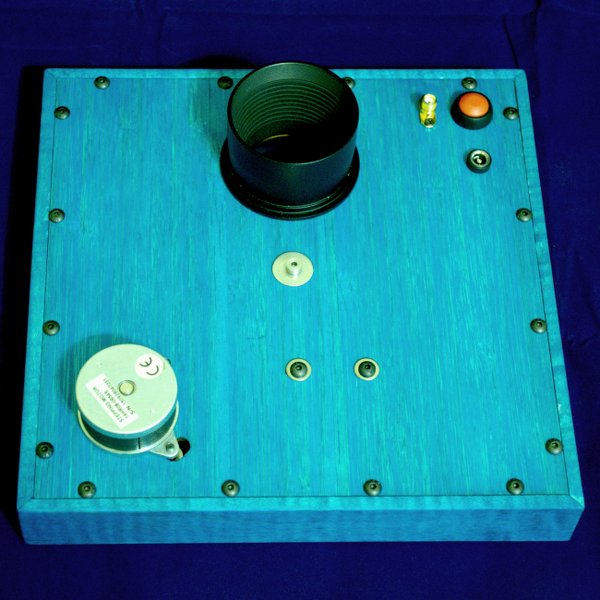
The goal of this project is to make a color filter wheel for astrophotography using an Arduino as the microcontroller. The wheel has positions for five 50mm round filters. It is motorized and interfaced to the camera, which is a QHY9S-M camera controlled by Nebulosity.
The material is mainly bamboo plywood, which is very rigid at first, then moves with changes in humidity.

The goal of this project is to make a color filter wheel using the knowledge gained from the previous two filter wheels. It is made from materials that won't change shape with changes in humidity (aluminum and acrylic). It is 1/2 inch larger in width, but the same thickness. The camera is now an SBIG STF-8300EN, and the software is Indilib running on a Raspberry Pi 4B.
The electronics are identical to the v2 wheel above, with the addition of an internal USB to Serial converter. The project is better documented, with build pictures and descriptions.